Category: General
Read the article
Category: Neck
Category: Lower Back
Category: Shoulder
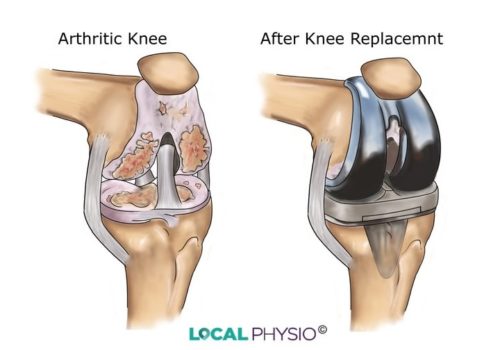
Category: Knee
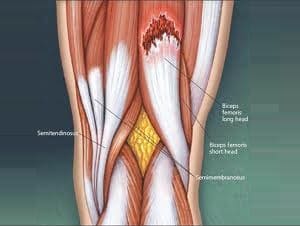
Category: Rear Thigh
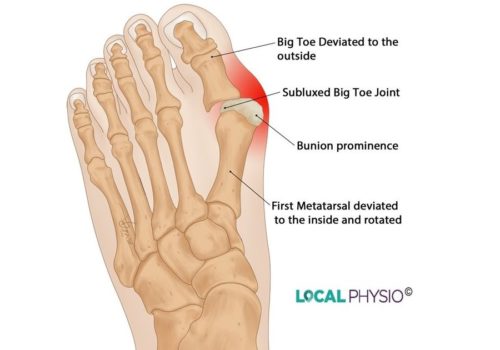
Category: Foot
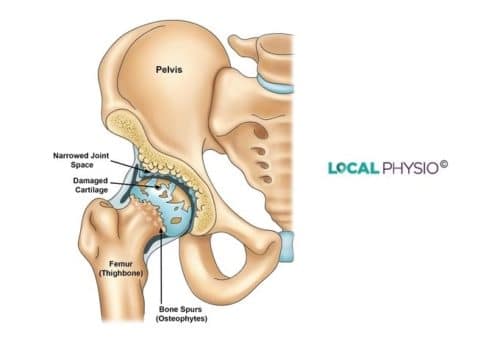
Category: Hip
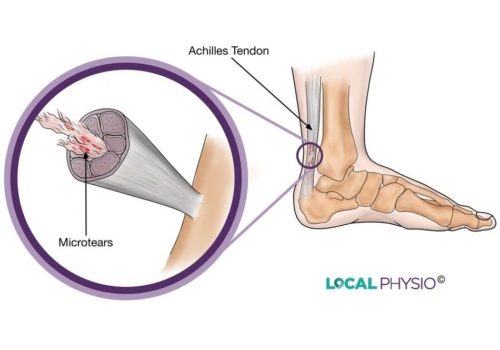
Category: Achilles Tendon & Heel